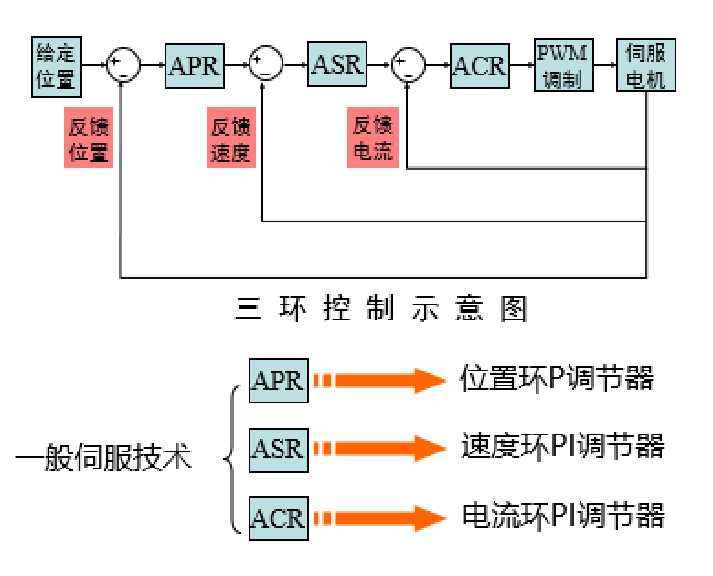
伺服是一个闭环系统,它是由电流环、速度环、位置环组成,位置环的输出作为速度环的给定,速度环的输出又是电流环的给定。
它本质上是一个跟随系统:
按接受的指令的速度运行 ;
按接受的指令的位置定位;
按接受的指令的扭矩出力。
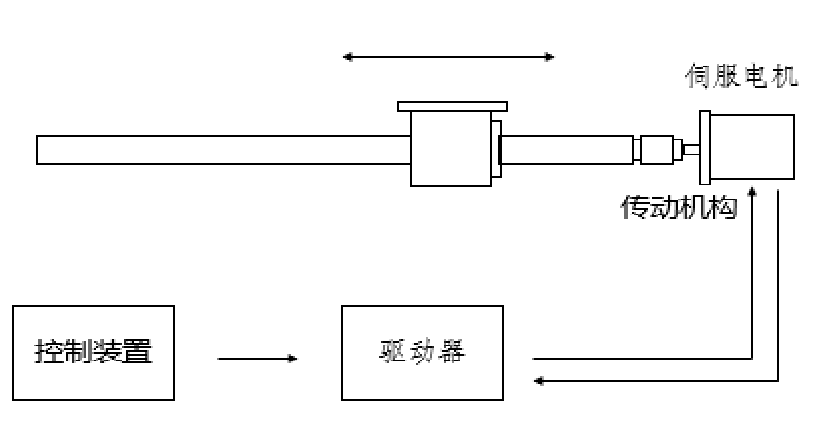
半闭环控制(SEMI-CLOSE LOOP)
将位置或速度传感器,安装于电机轴上以取得位置反馈信号及速度反馈信号。
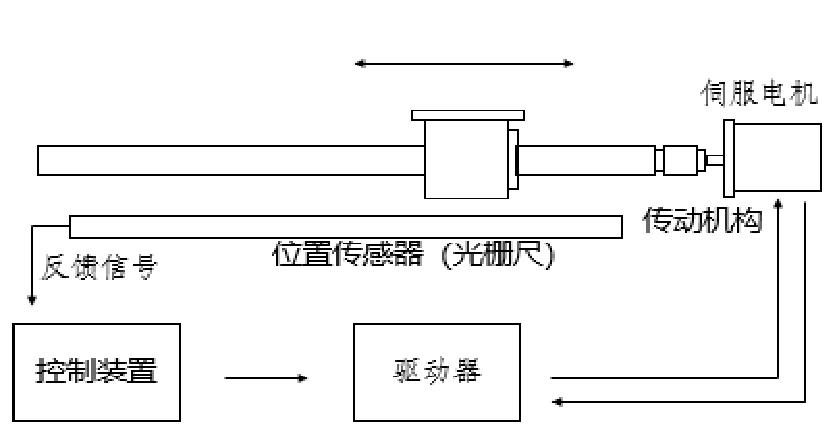
全闭环控制(FULL-CLOSE LOOP)
利用光栅尺等位置传感器,直接将物体的位移量同步返回到控制系统。
北京普天精锐自控技术有限责任公司 北京市昌平区育知东路首开智慧社1号楼3单元310室 010-82397875 京ICP备13002032号-1 技术支持:武汉网户
